自动化手术机器人于无牙颌种植修复的研究与突破
2019-02-20
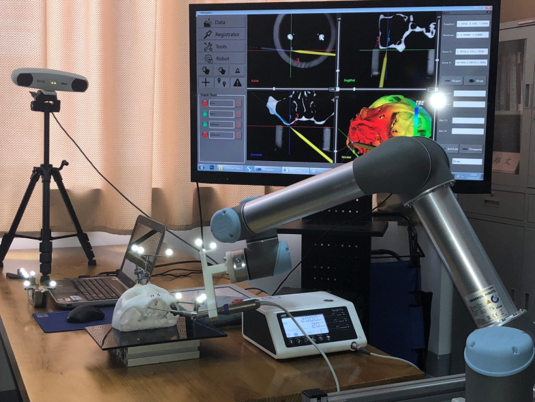
颌面部无牙颌种植手术往往空间狭窄、位点精确度要求高、术区可能毗邻重要结构,需要十分精准以尽可能避免严重并发症。医用机器人可以完成定位、操作双精准的目的。通过上海交通大学医工交叉项目“面向狭窄空间精准颧种植手术的机器人机构设计及实时导航关键技术研究” 支持下,建立自主研发导航系统与商用机械臂集成口腔种植专用机器人,通过坐标系转化实现导航系统对机器人系统精确控制,通过线性插值算法实现机器人运动轨迹细化。
2019-02-20
颌面部无牙颌种植手术往往空间狭窄、位点精确度要求高、术区可能毗邻重要结构,需要十分精准以尽可能避免严重并发症。医用机器人可以完成定位、操作双精准的目的。通过上海交通大学医工交叉项目“面向狭窄空间精准颧种植手术的机器人机构设计及实时导航关键技术研究” 支持下,建立自主研发导航系统与商用机械臂集成口腔种植专用机器人,通过坐标系转化实现导航系统对机器人系统精确控制,通过线性插值算法实现机器人运动轨迹细化。